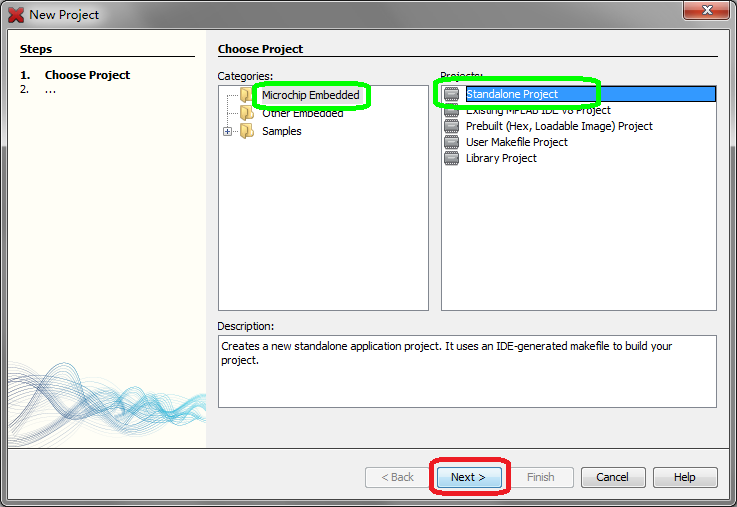
Create A New Project
- Click "File" -> "New Project". In the dialog poped, configure as the image below:
- In "Select Device" step, set "Family" to "16-bit DSCs (dsPIC30)", "Device" to "dsPIC30F6014A".
- In "Select Tool" step, nothing need to be changed.
- In "Select Compiler" step, select "XC16".
- In "Select Project Name and Folder" step, choose the Folder to place the project.
Configure to Link The Library
- In the "Projects" tree view on the left side of the IDE, right click on the project just created and click "Set as Main Project". This guarantees the operations in the IDE will be applied to the project.
- Right click "Libraries" under the project's tree and then click "Add Library Object/File". Then, locate the "el.a" file.
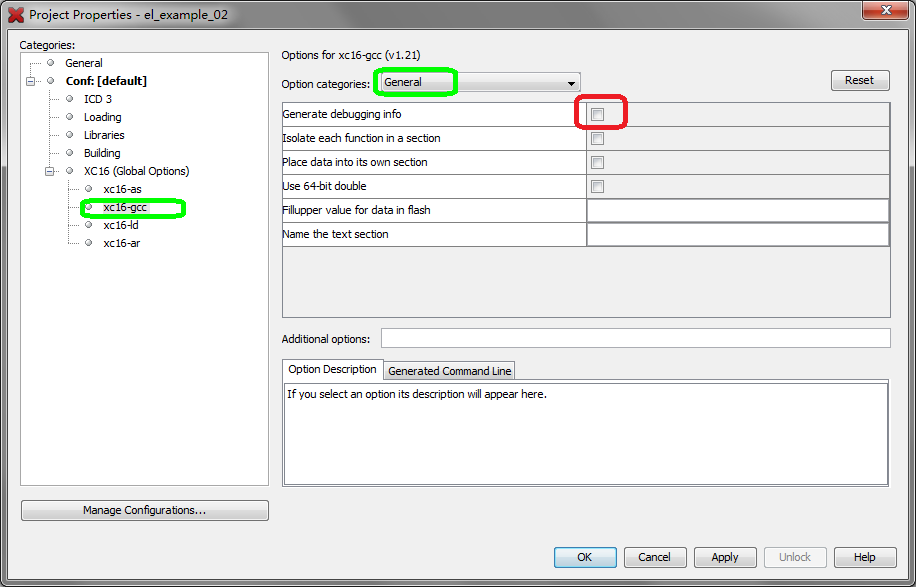
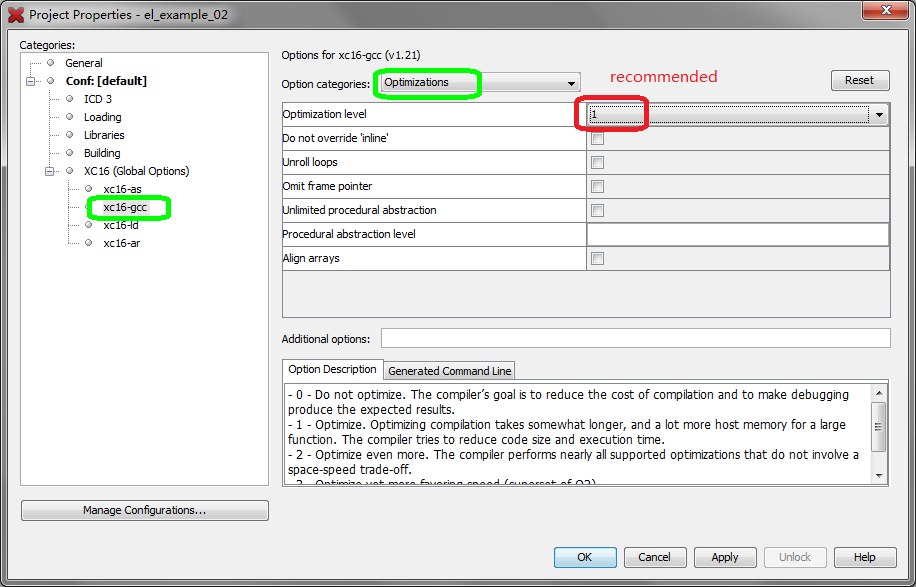
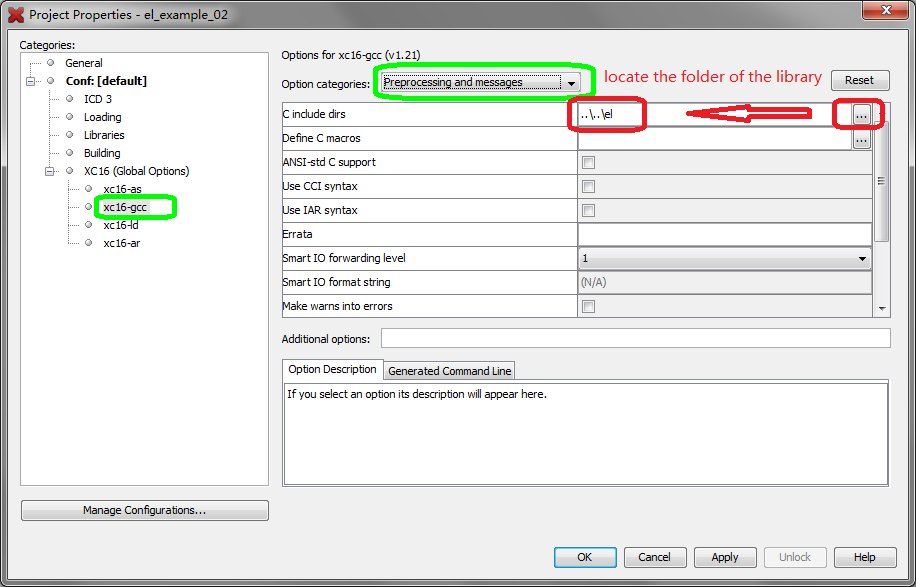
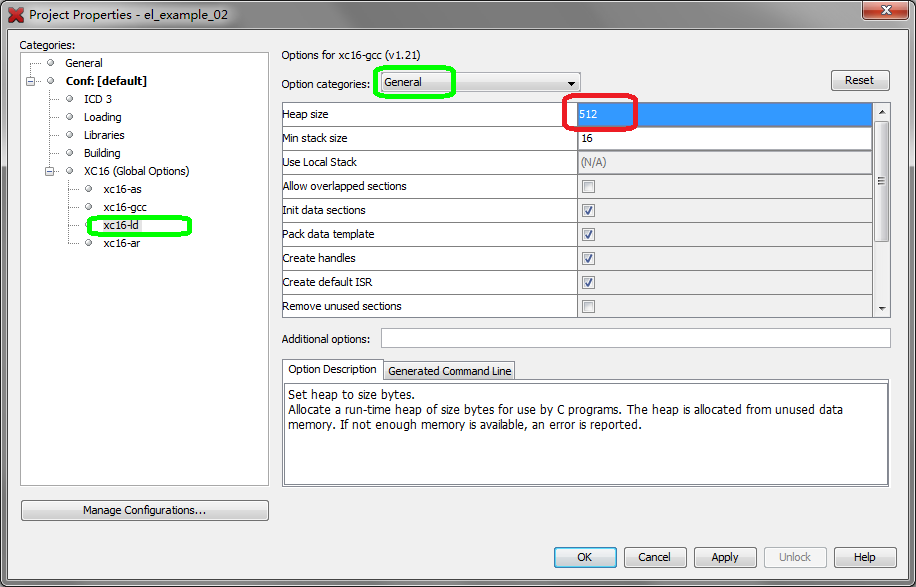
- Right click the project in the tree view and then click "Properties". This opens the project properties window.
- In the project properties window, the configure as the following images:
Test Build
The "Hello World" program based on this library may be written as follow:
#include <elu.h>
int main(int argc,char*argv[]){
return 0;
}
 1.8.8
1.8.8

